ServoMotor
Description
The ServoMotor is a template class, that you can use in your own Java-project. You can set the servo to a specific location, likewise to 110 degrees of it’s range.
You can use a wide variety of analog servo motors such as the SG92R or the SG-5010 (for a little more torque).
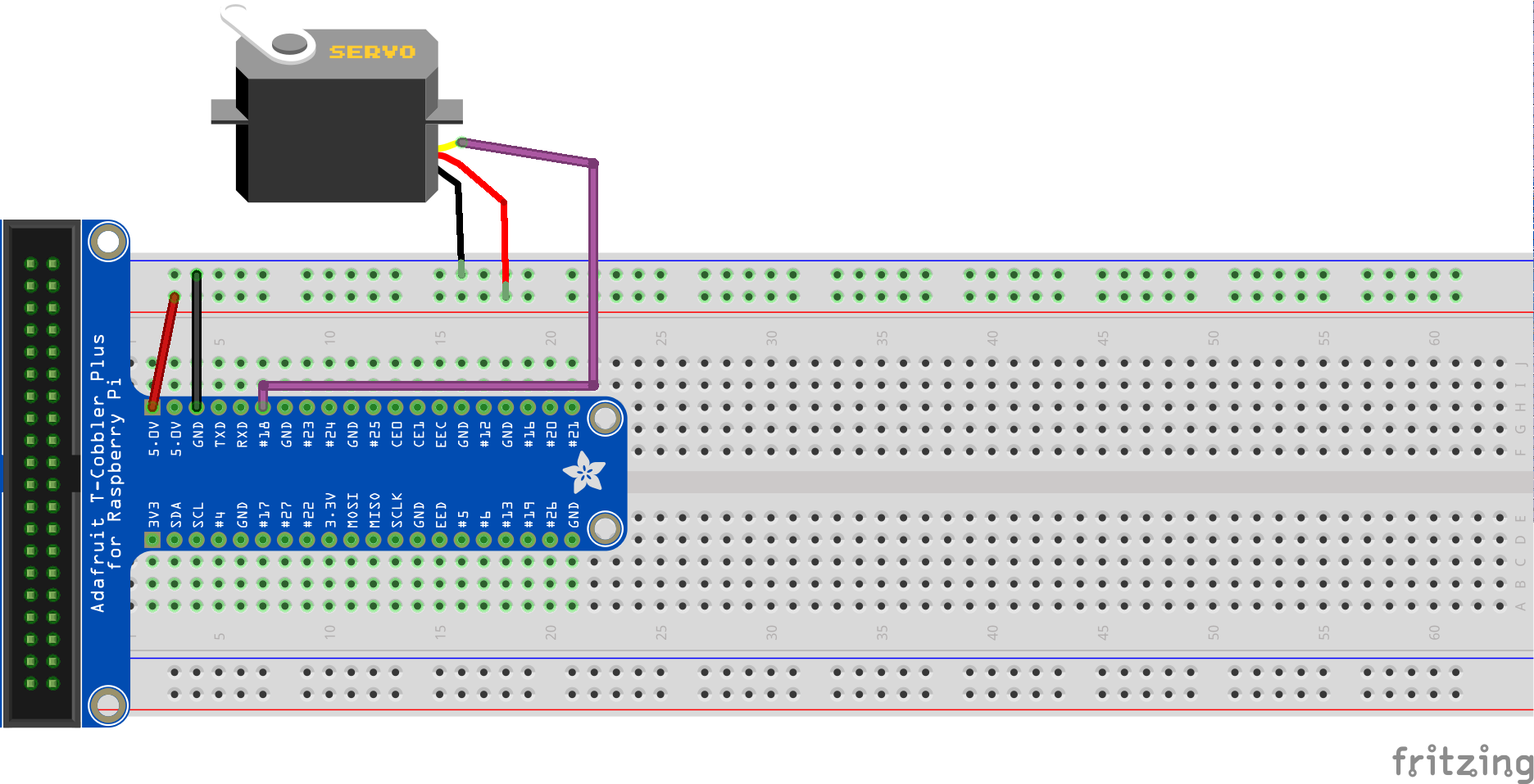
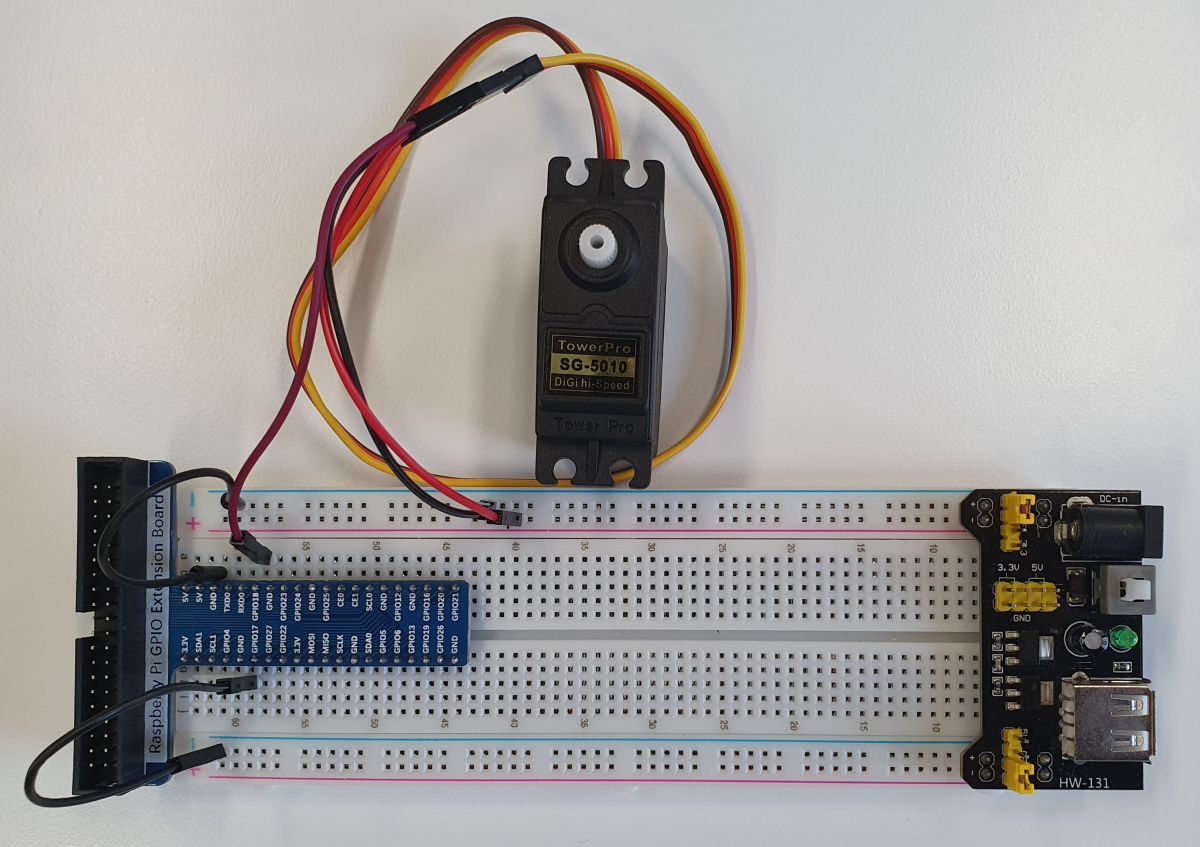
Layout


Code
An example how to use the Servo-Class from the Hardware-Catalog:
// Initialize servo motor component
final var servoMotor = new ServoMotor(pi4j, PIN.PWM18, 50, -90.0f, 90.0f, 2.0f, 12f);
// Demonstrate the percentage mapping on the servo
System.out.println("In 2 seconds, the servo motor will move to the left-most position which is 0%");
delay(Duration.ofSeconds(2));
servoMotor.setPercent(0);
System.out.println("In another 2 seconds, the servo motor will show 100% by moving to the right-most position");
delay(Duration.ofSeconds(2));
servoMotor.setPercent(100);
System.out.println("Last but not least, in 2 more seconds the servo will be centered to display 50%");
delay(Duration.ofSeconds(2));
servoMotor.setPercent(50);
// Sweep once from left to right using the setAngle function
System.out.println("We will sweep once to the left in 2 seconds...");
delay(Duration.ofSeconds(2));
servoMotor.setAngle(-45);
System.out.println("... and now to the right in 2 more seconds!");
delay(Duration.ofSeconds(2));
servoMotor.setAngle(45);
// Use a custom range for displaying the data
System.out.println("Imagine a pointer on the servo positioned above a label between -20ºC and +40ºC");
System.out.println("By using the setRange() method, we can automatically map our temperature range to the servo range!");
System.out.println("As an example, in five seconds the servo will show -10º which should be on the far left of the servo.");
delay(Duration.ofSeconds(2));
servoMotor.setRange(-20, +40); // This will define our range as values between -20 and +40
servoMotor.moveOnRange(-10); // This will map -10 based on the previously defined range
servoMotor.reset();
Further application
The class is implemented in the two sample projects Theremin and Photobooth.
Further project ideas
- As a Servo can cover up to 180 degrees, it could be used as a steering-wheel hooked to a potentiometer
- As a pointer, to show how much time is left in a timer