Joystick Analog
Description
The JoystickAnalog is a template class, that you can use in your own Java-project. The template class is created for an analog joystick, for example the KY-023, which consists of two potentiometers, one for the X-axis and one for the Y-axis. But any joystick with two potentiometers will meet the requirements.
The basic functions of the template class are:
- return of a normalized value, optionally between 0 and 1 or between -1 and 1, of the X-axis and the Y-axis
- creation of simple events at a value change of the X-axis or the Y-axis, simple event handlers for button pressed, button depressed, while button is pressed
- calibration of the center position of the joystick (center position 0.5 at a normalized value between 0 and 1, center position 0 at a normalized value between -1 and 1)
Layout
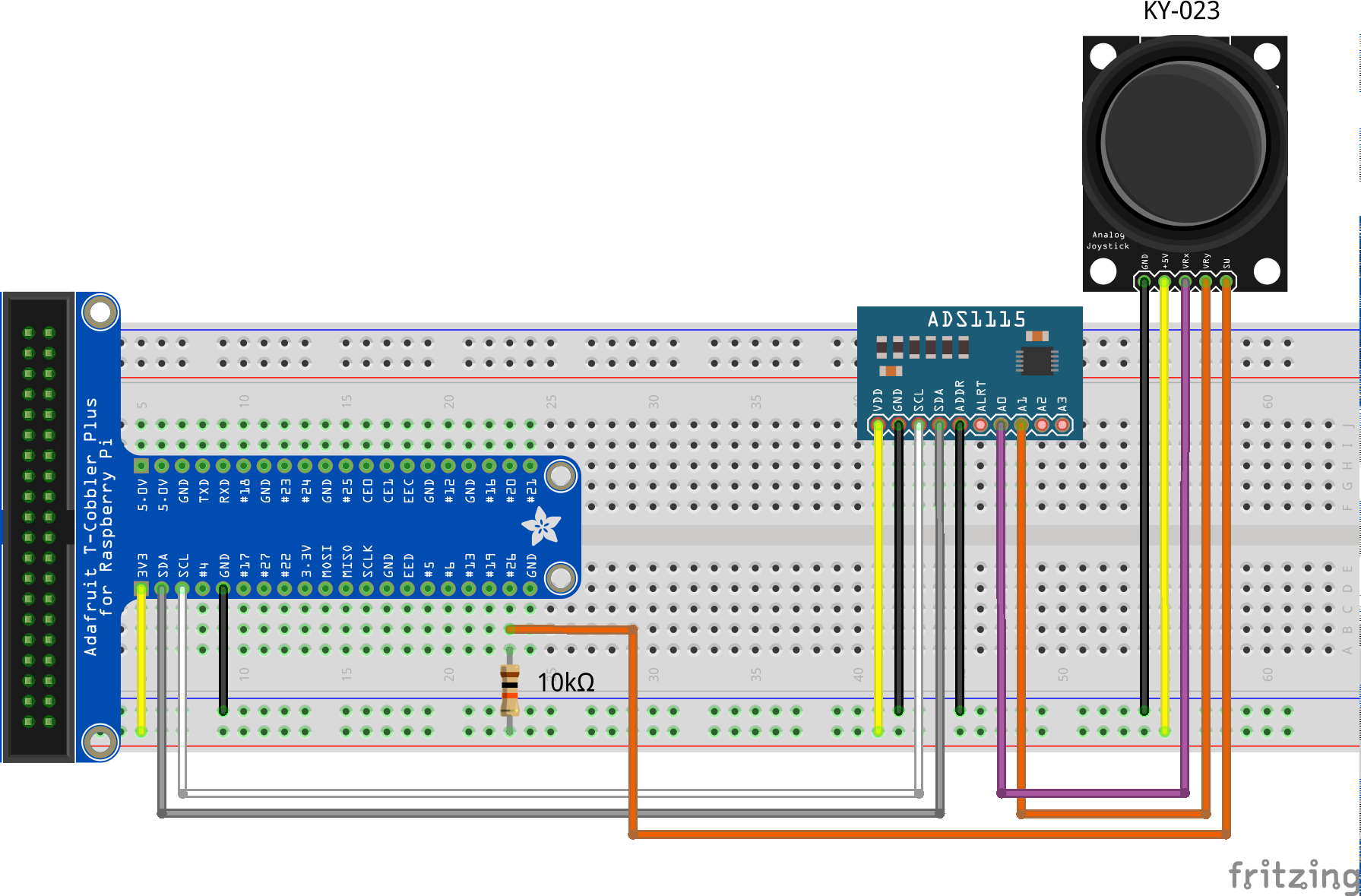
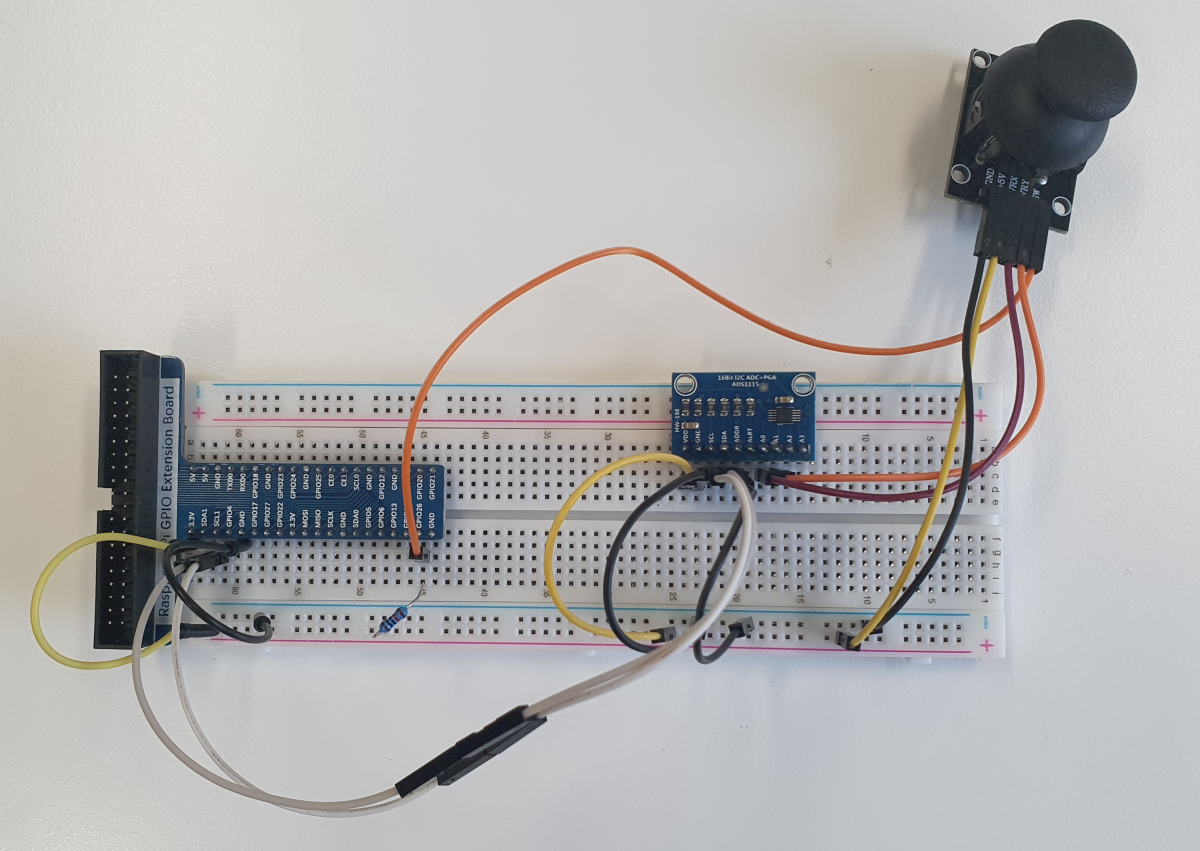


Code
A simple example on how to use the JoystickAnalog-Class from the Hardware-Catalog:
// an analog joystick needs an ADC
Ads1115 ads1115 = new Ads1115(pi4j);
//joystick with normalized axis from -1 to 1
JoystickAnalog joystick = new JoystickAnalog(ads1115, Ads1115.Channel.A0, Ads1115.Channel.A1, PIN.D26, true);
//register all event handlers you need
joystick.onMove((xPos, yPos) -> System.out.printf("Current position of joystick is: %.2f, %.2f%n", xPos, yPos),
() -> System.out.println("Joystick in home position"));
joystick.onDown (() -> System.out.println("Pressing the button"));
joystick.onUp (() -> System.out.println("Stopped pressing."));
joystick.whilePressed(() -> System.out.println("Button is still pressed."), Duration.ofMillis(500));
//start continuous reading after all ADC channels are configured
ads1115.startContinuousReading(0.1);
System.out.println("Move the joystick to see it in action!");
//wait while handling events before exiting
delay(Duration.ofSeconds(30));
//cleanup
joystick.reset();
Further project ideas
- create your own PlayStation controller
- use the joystick to control the position of servo motors steplessly